Existen una serie de métodos experimentales de ajuste de controladores PID. Estos métodos no requieren obtener un modelo del proceso, ni realizar cálculos matemáticos. Se basan en realizar un experimento sobre el proceso y aplicar unas sencillas reglas
Método basado en la curva de reacción o Prueba del Proceso Escalón
1.-Con el controlador en posición manual (es decir, el circuito abierto), se aplica al proceso un cambio escalón en la señal de salida del controlador. La magnitud del cambio debe ser lo suficientemente grande como para que se pueda medir el cambio consecuente en la señal de salida del transmisor, pero no tanto como para que las no linealidades del proceso ocasionen la distorsión de la respuesta.
2.- La respuesta de la señal de salida del transmisor se registra con graficador de papel continuo, o sistema de adquisición de señal digital. La graficación debe cubrir el período completo de la prueba, desde la introducción de la prueba escalón hasta que el sistema alcance un nuevo estado estacionario. La prueba puede durar entre unos cuantos minutos y varias horas, dependiendo de las características de respuesta del proceso.

Si se obtiene una curva S como la que se observa en la figura anterior, se puede caracterizar al procesos como un sistema de primer orden más tiempo muerto:


Para hallar el valor de la constante de tiempo tao y el valor de retardo to se emplea un método gráfico:

Donde:

Para hallar los parámetros del controlador, se puede utilizar la tabla de los autores Ziegler-Nichols:
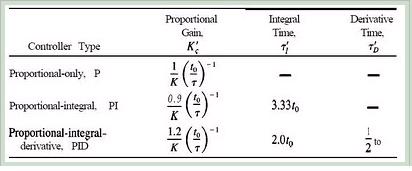
Se recomienda usar estas reglas de sintonización preferentemente cuando se cumpla la siguiente condición:
0.1 menor que ( to / tao ) menor que 1
Sin duda, que las reglas de sintonización de Ziegler- Nichols son las más conocidas, ellas estan basadas en lograr una relación de 0.25 (1/4) entre el valor del segundo y el primer pico positivo de la respuesta temporal del sistema ante una entrada escalón. Sin embargo, estas reglas están basadas en numeroso ensayos (pruebas heurísticas) sobre sistemas pilotos. A mediados de loa años 80, surgen nuevas reglas de ajuste basados en la minimización de alguna medida del error:

Los parámetros de ajuste siguiendo estos criterios se muestran a continuación:

Otras Reglas de Ajuste propuestas por los Autores Cohen - Coon son las mostradas en las siguientes tablas:

Donde el parámetro teta se corresponde con to.
Método de Ganancia Ultima o de Oscilación

No hay comentarios:
Publicar un comentario